UNI Salzburg - Institut für Computerwissenschaften
RoboLab
Helmut Mayer
Im Experimentallabor RoboLab an unserem Institut beschäftigt sich eine
Gruppe von Studenten unter Leitung von Professor Pfalzgraf und Dr. Mayer
mit dem Aufbau einer soliden Hardwarebasis für die weitere Beschäftigung
mit Teilbereichen der Robotik, z. B. Multi-Agenten-Systeme, Mobile Autonome
Roboter und der Anwendung von Methoden des Soft Computing (Neuronale Netze,
Evolutionäre Algorithmen, Fuzzy Regelbasen) auf diese Systeme. Ein Schwerpunktthema
ist derzeit die Entwicklung eines mobilen autonomen Roboterfußballers,
der völlig selbständig agiert. Roboterfußball wird zur Zeit von vielen
Stellen (Universitäten und Industrie) sehr gefördert, da das Spiel auf
einem Feld mit definierten Umgebungsbedingungen ein komplexes, dynamisches
Problem darstellt, d.h. der Roboter muß sich ständig auf geänderte Bedingungen
einstellen und möglicherweise während des Spiels neue Strategien erlernen.
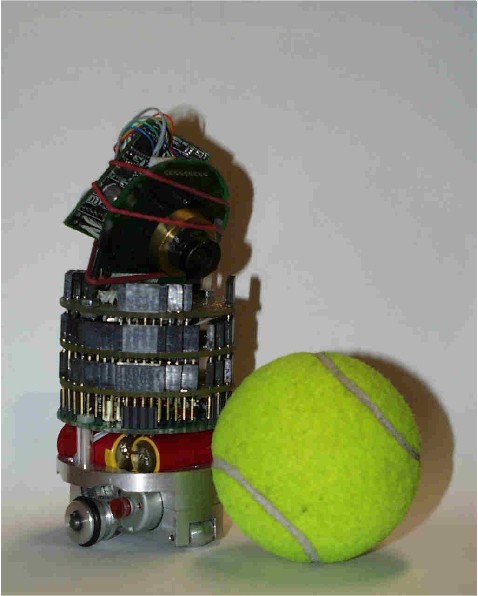
Herzstück unserer EMMA (Embedded Mobile Agent), eine "High-Tech-Dose" von
12 cm Höhe und 6 cm Durchmesser, ist der Siemens Mikrocontroller SAB C167CR,
 der für die Bildverarbeitung (Visuelles System des Roboters) und die Motorsteuerung
(Motorisches System), die derzeit mit neuen Methoden des Fuzzy Computing
implementiert ist, verwendet wird. Momentan werden auf einem bestehenden
Protoyp die einzelnen Softwarekomponenten (entwickelt mit Tasking Compiler)
integriert und wir hoffen, daß unsere EMMA alsbald ihre ersten Tore schießt.
Für die Zukunft ist der Ausbau von EMMA auf ein Multicontrollersystem geplant,
wobei die einzelnen MCs Subaufgaben übernehmen sollen. Auf diesen MCs sollen
dann auch Softwaresimulationen Neuronaler Netze die Steuerung des Roboters
übernehmen (der SAB C167CR als Neurocontroller).
der für die Bildverarbeitung (Visuelles System des Roboters) und die Motorsteuerung
(Motorisches System), die derzeit mit neuen Methoden des Fuzzy Computing
implementiert ist, verwendet wird. Momentan werden auf einem bestehenden
Protoyp die einzelnen Softwarekomponenten (entwickelt mit Tasking Compiler)
integriert und wir hoffen, daß unsere EMMA alsbald ihre ersten Tore schießt.
Für die Zukunft ist der Ausbau von EMMA auf ein Multicontrollersystem geplant,
wobei die einzelnen MCs Subaufgaben übernehmen sollen. Auf diesen MCs sollen
dann auch Softwaresimulationen Neuronaler Netze die Steuerung des Roboters
übernehmen (der SAB C167CR als Neurocontroller).