|
|
Monitor für Mikrocontroller
|
Mikroelektronik
|
|
Entwicklung
Walter Waldner
walter.waldner@telekabel.at
Mikroelektronik
Monitor für Mikrocontroller
http://www.htblmo-klu.ac.at/lernen/
Monitor für Mikrocontroller
Generieren des Target-Monitors für das Phytec-kitCON-167-Board und die
KEIL-Toolkette (Siemens C167CR-Starterkit)
© Walter Waldner, Dezember 1998
1. Einleitung
Die KEIL-Toolkette für die Siemens 16-bit Mikrocontroller-Familie erlaubt
die Software-Entwicklung mit dem Assembler bzw. dem ANSI-C-Compiler und
das komfortable Laden, Simulieren und Debuggen der Anwenderprogramme (dScope).
Eine ausführliche Beschreibung der KEIL-Entwicklungsumgebung (µVision)
für das Phytec-kitCON-167-Board, das dem Siemens C167CR-Starterkit beiliegt,
finden Sie in [1].
1.1 Beachten Sie die Starterkit-Version
Vom Siemens C167CR-Starterkit gibt es inzwischen zwei Versionen, die sich
geringfügig unterscheiden. Die Ausführungen dieses Artikels gelten mit
kleinen Änderungen für beide Starterkit-Ausgaben.
So erkennen Sie Ihr Starterkit:
Starterkit 1997
Phytec-Hardware Manual
Version 1.0 6/1997
Starterkit-CD-ROM: Edition 2.1
Starterkit 1998
Phytec-Hardware Manual
Version 2.0 7/1998
Starterkit-CD-ROM: Edition 3.2
Das Phytec-kitCON-Board enthält gegenüber
der Vorversion 16 LEDs, die mit Port 2 verbunden sind.
In diesem Artikel wird vor allem das KEIL-Entwicklungstool dScope (ein
MS-Windows-Programm für den PC) beschrieben. Die Ausführungen beziehen
sich stets auf den Mikrocontroller C167CR bzw. das entsprechende Siemens
C167CR-Starterkit. Falls es Unterschiede zwischen den beiden Starterkit-Versionen
gibt, sind diese explizit angeführt.
dScope vereint zwei Funktionen unter einer einheitlichen Oberfläche:
l
C167-Hardware-Simulator
dScope bildet die Funktionen des Mikrocontrollers
durch Software nach und erlaubt so die Simulation von C167-Anwenderprogrammen
l
Debugger (Target-Simulator)
Das Anwenderprogramm läuft auf der Ziel-Hardware
(in diesem Fall dem Phytec kitCON-167-Board). dScope kommuniziert mit der
Ziel-Hardware und ermöglicht verschiedene Debug-Funktionen. KEIL nennt
den Debugger auch tScope. In diesem Artikel werden wir für den Debugger
aber stets die Bezeichnung dScope verwenden.
Der Debugger (tScope) und der
Hardware-Simulator (dScope) bieten dieselbe Benutzeroberfläche.
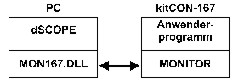
Für das Arbeiten mit dem dScope-Debugger muss in den Speicher (RAM bzw.
FLASH Memory) des Phytec kitCON-167-Boards ein Monitor-Programm geladen
werden, das über eine spezielle DLL und über die serielle Schnittstelle
mit dem dSCOPE-Programm am PC kommuniziert.
Die dScope-Oberfläche und das Monitorprogramm ermöglichen unter anderem
folgende Funktionen:
l
Laden von Anwendungsprogrammen in das SRAM
l
Starten / Unterbrechen von Programmen
l
Schrittweise Programmausführung auf Source-Code-Ebene
l
Setzen / Löschen von Breakpoints
l
Betrachten der CPU-internen Register und SFRs
l
Darstellung der Onchip-Peripherals des C167
l
Anzeige von Unterprogramm- und Interrupt-Service-Routinen-Aufrufen
l
Anzeige / Verändern von Speicherinhalten und Variablen
l
Disassemblieren von Code-Sequenzen
l
Performance-Analyse
Für das Zusammenspiel von dScope und dem Monitorprogramm gibt es eine Reihe
von Konfigurationsmöglichkeiten, die in diesem Artikel beschrieben werden.
Die Optionen sind im wesentlichen:
l
MONITOR ins SRAM oder FLASH laden
l
Kommunikation über die integrierte serielle Schnittstelle ASC0 des C167
oder über eine software-simulierte serielle Schnittstelle
Außerdem können die Baudraten für die Kommunikation unterschiedlich eingestellt
werden. Die Source-Dateien für das Erstellen individuell konfigurierter
Monitor-Dateien sind Teil der Demo-Version der Keil-Toolkette, die sich
auf der Starterkit-CD-ROM befindet.
2. Generieren des Monitor-Programms
Wir nehmen an, dass die KEIL-Toolkette in das Verzeichnis
C:\C166EVAL
installiert wurde. Im Unterverzeichnis
C:\C166EVAL\MON166
befinden sich die Source-Codes zum Erzeugen der Dateien BOOT und MONITOR.
BOOT wird vom internen Bootstrap-Loader des C167 geladen und gestartet
und wird benötigt, um das Monitor-Programm in das SRAM des kitCON-Boards
zu bringen. Zum besseren Verständnis der folgenden Ausführungen sollten
Sie zunächst die Datei README.TXT im obigen Verzeichnis lesen.
Für das KitCON-Board sind die Source-Dateien
CONFPHY7.INC
BOOTPHY7.A66
INSTPHY7.A66
relevant. In der Datei CONFPHY7.INC werden Parameter für die Konfiguration
der SYSCON- und der BUSCON-Register definiert. Diese Datei wird beim Assemblieren
von BOOTPHY7.A66 und INSTPHY7.A66 gelesen.
Obwohl die README.TXT-Datei im MON166-Verzeichnis behauptet, dass die Dateien
CONFPHY7.INC, BOOTPHY7.A66 und INSTPHY7.A66 für das kitCON-167-Board adaptiert
wurden, sind dort einige Parameter falsch gesetzt.
2.1. Anpassen der Source-Dateien für das kitCON167-Board
In der Datei CONFPHY7.INC sind folgende Zeilen zu ändern:
_MCTC0 EQU 0
; Memory wait states is 0 (MCTC0 = 0FH).
_RWDC0 EQU 0
; 0 = Delay Time 0.5 States (Reset Value)
_MTTC0 EQU 1
; 1 = No Delay Time 0 States
In der Datei BOOTPHY7.A66 sind die folgenden Veränderungen durchzuführen:
Die Zeile
BFLDL SYSCON,#080H,#SYS_L
ist zu ersetzen durch
$IF (WRCFG_ENABLE == 1)
BFLDL SYSCON,#084H,#SYS_L
$ELSE
BFLDL SYSCON,#004H,#SYS_L
$ENDIF








|
http://�www�.�htblmo-klu�.�ac�.at/lernen/ �walter�.�waldner�@�telekabel�.at Walter �Waldner�
|
PCNEWS-61 Februar 1999
|
97
|
|
|
Mikroelektronik
|
Monitor für Mikrocontroller
|
|
|
Starter-Kit 1998: Auf der diesem Starterkit beiliegenden CD-ROM (Edition
3.2) sind diese Änderungen in der Datei CONFPHY7.INC bereits vorgenommen
worden.
Außerdem können die Zeilen
MOV ADDRSEL2,#1008H
; 1MB RAM BANK2 (10:0000H - 1F:FFFFH)
MOV BUSCON2,BUSCON0
gelöscht werden (bzw. durch ein Semikolon in der ersten Spalte als Kommentar
markiert werden), da das kitCON-167-Board nur das Flash-Memory (wird durch
das chip-select-Signal CS0 [BUSCON0] aktiviert) und den RAM-Speicher (wird
durch CS1 [BUSCON1, ADDRSEL1] aktiviert) als externe Komponenten enthält.
Es spricht allerdings nichts gegen das Verbleiben der Zeilen in der Source-Datei,
außer Sie benötigen CS2 in Ihre Applikation zum Ansteuern externer Komponenten.
CS2 ist auf dem kitCON-Board selbst nicht in Verwendung.
In der Datei INSTPHY7.A66 sind folgende Einträge zu verändern:
Die Zeile
BFLDL SYSCON,#080H,#SYS_L
ist durch
$IF (WRCFG_ENABLE == 1)
BFLDL SYSCON,#084H,#SYS_L
$ELSE
BFLDL SYSCON,#004H,#SYS_L
$ENDIF
zu ersetzen.
Für die Zeilen
MOV ADDRSEL2,#1008H
MOV BUSCON2,BUSCON0
gelten die oben gemachten Aussagen.
Schließlich sind die Definitionen zur simulierten seriellen Schnittstelle
falsch. Die Zeilen
T_LINE BIT P2.0
; Transmit Data Line TxD
T_OUT BIT DP2.0
; Port direction register for TxD
R_LINE BIT P2.1
; Receive Data Line RxD
R_IN BIT DP2.1
; Port direction register for RxD
müssen ersetzt werden. Hier sind Unterschiede für die beiden kitCON-Varianten
zu beachten.
Wenn Sie das ältere kitCON167-Board besitzen (Ausgabe 1997), ist einzugeben:
T_LINE BIT P3.0
; Transmit Data Line TxD
T_OUT BIT DP3.0
; Port direction register for TxD
R_LINE BIT P3.2
; Receive Data Line RxD
R_IN BIT DP3.2
; Port direction register for RxD
Für das neuere kitCON167-Board (Ausgabe 1998 mit den LEDs an Port 2) ist
einzugeben:
T_LINE BIT P3.9
; Transmit Data Line TxD
T_OUT BIT DP3.9
; Port direction register for TxD
R_LINE BIT P3.8
; Receive Data Line RxD
R_IN BIT DP3.8
; Port direction register for RxD
2.2. Varianten für die Verwendung des Monitor-Programms
Für das Arbeiten mit dScope/Monitor kann der Anwender zwischen folgenden
Varianten wählen:
1 Monitor wird in das SRAM geladen
Die Kommunikation zwischen dScope und
dem Monitor läuft über die serielle Schnittstelle des Phytec-Boards (DB9-Stecker
P1)
Der Monitor wird über den C167-Bootstrap-Mechanismus und mit Hilfe des
Programms BOOT geladen
2 Der Monitor wird mittels FLASHT.EXE in das Flash-Memory des Phytec-Boards
programmiert. Die Kommunikation läuft über die serielle Schnittstelle des
Boards (DB9-Stecker P1)
3 Der Monitor wird mittels FLASHT.EXE in das Flash-Memory des Phytec-Boards
programmiert. Die Monitor-dScope-Kommunikation läuft über die simulierte
serielle Schnittstelle (Debug-Interface DB9-Buchse P2)
Für die Variante 1 müssen die Absolute-Object-Dateien BOOT und MONITOR
erzeugt werden, für die beiden anderen Varianten benötigt man die Intel-Hex-Datei
MONITOR.H86, die dann mit dem Programmiertool FLASHT.EXE in das Flash-Memory
programmiert wird. Im folgenden wird beschrieben, wie Sie diese Dateien
erzeugen können. In jedem Fall sind zunächst die vorher beschriebenen Änderungen
in den Dateien CONFPHY7.INC, BOOTPHY7.A66 und INSTPHY7.A66 erforderlich.
2.2.1. Variante 1
In dieser Variante wird nur das SRAM des kitCON-167-Boards und die Bootstrap-Sequenz
des Mikrocontrollers verwendet. Das Bootstrap-Programm befindet sich im
BOOT-ROM des C167 und wird aktiviert, wenn der BOOT-Mode gewählt wurde
(der Jumper P2 1+2 muss mit dem [roten] Stecker geschlossen werden und
die RESET-Taste am Phytec-Board muss gedrückt werden). Der Ablauf des Boot-Vorgangs
ist wie folgt:
|
Schritt
|
Aktion
|
|
1
|
Die C167-Bootstrap-Sequenz wartet auf ein 0-Byte vom PC und sendet ID-Byte
zum PC-Programm (in unserem Fall ist das dScope)
|
|
2
|
Die C167-Bootstrap-Sequenz lädt ein 32 Byte großes Preload-Programm ins
RAM (das sind die ersten 32 Bytes der Datei BOOT)
|
|
3
|
Das Preload-Programm wird aktiviert und lädt den Rest des Programms BOOT
ins RAM
|
|
4
|
BOOT wird aktiviert und lädt den MONITOR ins RAM
|
|
5
|
Der MONITOR wird aktiviert und kommuniziert mit dScope. dScope kann verschiedene
Kommandos an den MONITOR senden(z.B. Laden des Anwenderprogramms ins RAM)
bzw. Daten vom MONITOR empfangen und anzeigen
|
Die Kommunikation zwischen dScope und dem Monitor läuft in Variante 1 über
die integrierte serielle Schnittstelle ASC0 des C167-Controllers. Nachfolgend
wird beschrieben, wie Sie die Dateien BOOT und MONITOR generieren können.
Öffnen Sie unter Windows das DOS-Fenster und wechseln Sie in das Verzeichnis
C:\C166EVAL\MON166
Nun geben Sie den Befehl
INSTALL PHY7 0 FEA FEC BOOTSTRAP
ein. Die Batch-Datei INSTALL erzeugt die Dateien BOOT und MONITOR (absolute
Objekt-Dateien) und kopiert sie auch gleich in das richtige Verzeichnis
C:\C166EVAL\BIN
Beachten Sie bitte, dass der C167 in den Bootstrap-Modus versetzt werden
muß. Dazu wird auf dem Board - Ausgabe 1997 - der rote Jumper (JP2 1+2)
gesetzt und die RESET-Taste gedrückt. Auf dem Phytec-Board – Ausgabe 1998
– ist der Schalter 1 auf SW3 zu schließen und RESET zu drücken.
Außerdem muss in der µVision-Oberfläche unter “Options - L166 Linker -Reserve
1“ eingetragen sein:
08h-0Bh, 0ACh-0AFh
Das Monitor-Programm verwendet den NMI (non maskable interrupt) als Breakpoint-Trap
und den Empfangs-Interrupt der seriellen Schnittstelle ASC0. Daher müssen
die oben angeführten Adressen in der Interrupt.Vektortabelle vor dem Überschreiben
geschützt werden.
ACHTUNG: Der Monitor verwendet Interrupt-Level 15, Group-Level 0 für den
ASC0-Receive-Interrupt (siehe README.TXT im MON166-Verzeichnis). Diese
Kombination darf im Anwenderprogramm NICHT verwendet werden.








|
98
|
PCNEWS-61 Februar 1999
|
Walter �Waldner� �walter�.�waldner�@�telekabel�.at http://�www�.�htblmo-klu�.�ac�.at/lernen/
|
|
|
|
Monitor für Mikrocontroller
|
Mikroelektronik
|
|
REKIRSCH







|
http://�www�.�htblmo-klu�.�ac�.at/lernen/ �walter�.�waldner�@�telekabel�.at Walter �Waldner�
|
PCNEWS-61 Februar 1999
|
99
|
|
|
Mikroelektronik
|
Monitor für Mikrocontroller
|
|
|
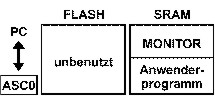
2.2.2. Variante 2
In diesem Fall wird der Monitor MONITOR.H86 in das Onboard-Flash-EEPROM
programmiert und muss nach Spannungsunterbrechungen des Boards nicht neu
geladen werden. Das Anwenderprogramm wird vom Monitor in das SRAM geladen.
Auch in dieser Variante kommunizieren dSCOPE und der Monitor über die integrierte
ASC0-Schnittstelle des C167-Microcontrollers. Zunächst beschreiben wir
das Erzeugen der Datei MONITOR.H86, die mit dem Programmiertool FLASHT.EXE
in das Flash-Memory programmiert werden kann.
Öffnen Sie unter Windows das DOS-Fenster und wechseln Sie in das Verzeichnis
C:\C166EVAL\MON166
Nun geben Sie den Befehl
INSTALL PHY7 0 FFE 2000
ein. Anschließend müssen Sie noch
..\BIN\OH166 MONITOR H167 OFFSET
(-0x200000)
eingeben. OH166.EXE konvertiert die “absolute object”-Datei MONITOR in
eine intel-Hex-86-Datei MONITOR.H86.
Nun können wir das dadurch erzeugte File MONITOR.H86 in das Flash-Memory
laden.
Dazu verwenden wir das Programm FLASHT.EXE. Auf der Starterkit-CD-ROM finden
wir es im Verzeichnis
X:\CDROM\STARTKIT\SK_167\FLASH
Zum Flash-Programmieren muss das Phytec-Board und der PC wird mit dem seriellen
Kabel verbunden und der C167 in den Bootstrap-Modus gebracht werden. Für
das kitCON-Board 1997 ist der rote Stecker auf Jumper JP2 1+2 zu setzen
und die RESET-Taste zu drücken. Für das neuere Board 1998 ist der Schalter
1 von SW3 zu schließen und RESET zu drücken. Das Flash-Programmiertool
FLASHT.EXE kann über die Batch-Dateien FLASHT_1.BAT (für COM1) bzw. FLASHT_2.BAT
(für COM2) oder auch direkt durch
flasht 1 br(9600) bzw.
flasht 2 br(9600)
gestartet werden. Die Parameter 1 bzw. 2 geben die Schnittstelle am PC
an (1=COM1, 2=COM2), die Zahl nach br die Baudrate der Kommunikation.
Nach dem Laden der Programmiersoftware wird die Option 7 (Löschen des Flash-Memory)
gewählt. Anschließend muss F2 gedrückt und der Pfad der Intel-Hex-Datei
angegeben werden. In unserem Fall geben wir ein:
C:\C166EVAL\MON166\MONITOR.H86
Ist der Ladevorgang abgeschlossen, wird FLASHT mit F1 beendet.
kitCON167-Board 1997
Entfernen Sie nun den roten Stecker von Jumper JP2 (1+2) und drücken Sie
RESET.
kitCON167-Board 1998
Öffnen Sie Schalter 1 auf SW3 und drücken Sie RESET.
Wie unter Variante 1 beschrieben, sind in der KEIL-Umgebung µVision unter
den Linker-Optionen die Adressen
08h-0Bh, 0ACh-0AFh
zu reservieren und die Verwendung von Interrupt-Level 15, Group-Level 0
im Anwenderprogramm verboten.
2.2.3. Variante 3
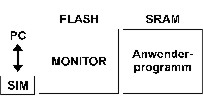
Variante 3 ist eine interessante Möglichkeit mit dem Monitor zu arbeiten,
die vor allem für fortgeschrittene C167-Anwender zu empfehlen ist. In diesem
Fall wird das Monitor-Programm so generiert, dass es über eine software-simulierte
serielle Schnittstelle mit dem PC kommuniziert.
Die vorher beschriebenen Varianten benutzen die C167-interne asynchrone
serielle Schnittstelle ASC0 zur Kommunikation zwischen Monitor und PC.
Damit ist es aber nicht uneingeschränkt möglich, Anwenderprogramme zu testen,
die selbst die asynchrone serielle Schnittstelle ASC0 des C167 benötigen.
Unter “simulierte serielle Schnittstelle” versteht man, dass das Monitorprogramm
über zwei beliebige I/O-Pins des C167-Mikrocontrollers das asynchrone Protokoll
der ASC0-Schnittstelle durch Software nachbildet. Ein Pin wird als Sendeleitung
(TxD), der andere als Empfangsleitung (RxD) verwendet. Nun waren die Entwickler
des Phytec-Boards so freundlich, die Pins 0 bzw. 9 (TxD) und 2 bzw. 8 (RxD)
des Ports 3 mit dem MAX232-Baustein zu verbinden (Pin 0 und 2 gelten für
das ältere kitCON167-Board-1997, Pin 9 und 8 gelten für das neuere kitCON167-Board-1998).
Der MAX232 kann für zwei Kanäle CMOS-Pegel in die von der RS232C-Schnittstelle
erforderlichen +10/-10 Volt-Pegel bzw. umgekehrt wandeln. Da nur ein Kanal
des MAX232 für die C167-interne serielle Schnittstelle verwendet wird,
ist der zweite Kanal für die software-simulierte serielle Kommunikation
frei.
Die Buchse P2 des Phytec-Boards kann wahlweise als CAN-Interface oder als
Debug-Schnittstelle für die simulierte serielle Kommunikation verwendet
werden. Die Auswahl geschieht über insgesamt drei Jumper. Damit wir die
simulierte serielle Schnittstelle verwenden können, müssen wir:
l
JP8 schließen (Phytec 1998: auf 2+3 setzen)
l
JP9 und JP10 auf 2+3 umsetzen
l
Auf dem Phytec-1998-Board ist zusätzlich noch JP2 zu schließen (auf 2+3
setzen)
Dadurch verbinden wir die MAX232-Leitungen mit der P2-Buchse (siehe Schaltpläne
im kitCON-167-Handbuch). (Die Pin-Belegungen der Jumper können Sie im Phytec-Handbuch
auf der Seite 23 nachlesen.)
Nun ergibt sich nur noch das Problem, dass P2 im Gegensatz zu P1 ein Stecker
(männlich) ist und somit das Kabel aus dem Starterkit nicht passt. Besorgen
Sie sich entweder einen sogenannten “Gender-Changer” (Buchse-Buchse / weiblich-weiblich)
oder löten Sie sich ein entsprechendes Kabel, was sehr einfach ist, da
nur drei Leitungen erforderlich sind. Dazu besorgen Sie sich zwei DB9-Buchsen
und verbinden
Das Erzeugen der Datei MONITOR.H86 für die Kommunikation über die simulierte
serielle Schnittstelle geschieht durch
INSTALL PHY7 2 FFE 2000
Damit wird die absolute Objekt-Datei MONITOR generiert. Anschließend müssen
Sie wie bei Variante 2
..\BIN\OH166 MONITOR H167 OFFSET
(-0x200000)
eingeben. OH166 erzeugt die intel-HEX-86-Datei MONITOR.H86. Zum Laden der
Datei MONITOR.H86 in das Flash-Memory ist wie unter Variante 2 beschrieben
vorzugehen. Beachten Sie, dass der C167 wiederum in den Bootstrap-Modus
geschalten werden muss (kitCON167-1997: Jumper JP2 1+2 schließen und RESET
drücken, kitCON167-1998: Schalter 1 auf SW3 schließen und RESET drücken).
Für die FLASH-Programmierung wird der PC über das Starterkit-Kabel mit
der seriellen Schnittstelle ASC0 des C167 verbunden (Buchse P1 !), da das
Flash-Tool FLASHT.EXE den Bootstrap-Mechanismus und damit die integrierte
serielle Schnittstelle ASC0 des C167 erfordert.







|
100
|
PCNEWS-61 Februar 1999
|
Walter �Waldner� �walter�.�waldner�@�telekabel�.at http://�www�.�htblmo-klu�.�ac�.at/lernen/
|
|
|
|
Monitor für Mikrocontroller
|
Mikroelektronik
|
|
Nach dem Programmieren des Flash-EEPROMs wird auf dem 1997er kitCON167-Board
der rote Stecker (JP2 1+2) entfernt, auf der 1998er-Ausgabe des kitCON-Boards
wird Schalter 1 auf SW3 geöffnet. In jedem Fall ist anschliessend die RESET-Taste
zu drücken. Der PC wird nun mit dem Phytec-Board über die Debug-Buchse
P2 verbunden (Gender-Changer oder selbstgelötetes Kabel verwenden). Die
interne asynchrone serielle Schnittstelle ASC0 des C167 (über Stecker P1)
steht dem Anwenderprogramm voll zur Verfügung und kann wahlweise mit einer
freien Schnittstelle des PCs oder anderer Zielhardware verbunden werden.
Die Variante 3 erfordert unter “Options - L166 Linker - Reserve 1“ in der
µVision-Umgebung nur den Eintrag
08h-0Bh
da in diesem Fall der ASC0-Receive-Interrupt vom Monitor nicht benutzt
wird, sondern dem Anwenderprogramm zur Verfügung steht. Interrupt-Level
15 / Group-Level 0 ist frei zur Verwendung im Anwenderprogramm.
Im Programm dScope ist unter
“Peripherials - Config. - Target Configuration”
die Option “use serial interrupt” zu deaktivieren !
3. Einstellen der Baudrate
Wenn Sie mit der Variante 1 arbeiten, erkennt der interne Bootstrap-Loader-Code
des C167 die in dScope eingestellte Baudrate automatisch anhand eines Nullbytes,
das die Kommunikation zwischen Bootstrap-Loader und dScope einleitet (siehe
Kapitel “Bootstrap Loader” im C167-User Manual).
Für die Variante 2 kann die Geschwindigkeit der serielle Kommunikation
zwischen dem Target-Monitor (Mikrocontroller-Board) und der dScope-Oberfläche
(am PC) in der Datei INSTPHY7.A66 eingestellt werden. Suchen Sie in der
Datei INSTPHY7.A66 den Abschnitt “Initialization of Serial Interface 0“.
Dort ist eine der MOV-Anweisungen
; MOV S0BG ,#0040H
; SET BAUDRATE TO 9600 BAUD @ 40MHz
; MOV S0BG ,#0020H
; SET BAUDRATE TO 19200 BAUD @ 40MHz
; MOV S0BG ,#000FH
; SET BAUDRATE TO 38400 BAUD @ 40MHz
MOV S0BG ,#000AH
; SET BAUDRATE TO 57600 BAUD @ 40MHz
zu aktivieren. Das führende Semikolon deaktiviert eine Zeile als Kommentar,
der beim Assemblieren überlesen wird. Um etwa 57600 Baud (die maximale
Geschwindigkeit) einzustellen, löschen Sie das Seminkolon in der Zeile
MOV S0BG ,#000AH
Alle anderen Optionen müssen durch ein Semikolon am Beginn der Zeile deaktiviert
sein.
Für die Variante 3 (simulierte serielle Schnittstelle) suchen Sie in der
Datei INSTPHY7.A66 die Stelle, die mit “Initialization of simulated Serial
Interface 2“ überschrieben ist. Dort kann die Zeile
BAUDRATE EQU 9600
auf
BAUDRATE EQU 38400
abgeändert werden. 38400 Baud ist die maximale Geschwindigkeit für die
simulierte serielle Schnittstelle. Sollten Kommunikationsprobleme auftreten,
empfehle ich eine geringere Baudrate (z.B. 19200) zu wählen.
Noch eine Bemerkung: Ältere C167-Controller hatten keine PLL-Einheit zum
Generieren des Systemtakts. Diese Bausteine erforderten einen externen
40MHz-Takt, der zur Erzeugung des Systemtakts mit exaktem duty-cycle von
50% intern durch zwei geteilt wurde. Aus diesem Grund ist in INSTPHY7.A66
stets 40 MHz die Berechnungsgrundlage. Die Zeile XTAL EQU 40000000 darf
NICHT geändert werden, da zur Berechnung der Zeitparameter für die serielle
Kommunikation XTAL ohnehin durch zwei dividiert wird.
4. STARTUP-CODE
Wenn Sie mit dem Monitor (Varianten 1 bis 3) arbeiten, initialisiert dieses
Programm die C167-Hardware bereits so, dass das Flash-Memory und das SRAM
richtig angesteuert werden (Adressraum und Timing, Register SYSCON, BUSCON0,
BUSCON1, ADDRSEL1). Ihr KEIL-Projekt erfordert keine spezielle STARTUP-Datei,
da Ihr Programm in eine richtig konfigurierte C167-Umgebung geladen wird.
Erst wenn Sie Ihr Anwendungsprogramm in das FLASH-Memory laden möchten,
ist eine STARTUP-Datei erforderlich, die mit dem komfortablen Tool DAVE
generiert werden kann.
5. EINSTELLUNGEN in der KEIL-Entwicklungsumgebung
Hier werden die wichtigsten Einstellungen für die Keil-Oberfläche beschrieben,
die für das Arbeiten mit den verschiedenen Monitor-Varianten erforderlich
sind.
In µVision (KEIL Software-Entwicklungsoberfläche) sind unter “Options -
L166 Linker - Location - Reserve 1“ die im Artikel beschriebenen Adressräume
zu reservieren (für alle Varianten 08h-0Bh, bzw. 0ACh-0AFh für die Varianten
1 und 2)
Unter “Options - L166 Linker - Classes” sind die Adressbereiche einzustellen,
die der Linker bei der Adresszuordnung für Anwenderdaten und -code verwendet.
Alle drei hier beschriebenen Varianten laden das Anwenderprogramm in das
SRAM. Der Compiler generiert, abhängig vom gewählten Speichermodell (in
unserem Beispiel SMALL) und abhängig von den Steuerworten, die bei der
Deklaration von Variablen, Konstanten und Unterprogramm verwendet werden,
Klassen vom Typ Code oder Daten mit bestimmten Namen, denen der Locater
gewisse Adressen zuweist.Wir können folgende Bereiche festlegen:
NCODE (0x0000-0x9FFF)
NDATA (0x4000-0x7FFF)
NDATA0 (0x4000-0x7FFF)
NCONST
(0x0000-0x3FFF)
Die Classes bedeuten:
NCODE: Anwendercode
NDATA: nicht initialisierte Variable
NDATA0: initialisierte
Variable
NCONST: Konstante
Nachdem ein Anwenderprogramm erstellt wurde (“Project - Make: Build Project),
kann der dScope-Debugger aufgerufen werden. Wählen Sie im Hauptmenü den
Punkt
Run - dScope Debugger
dScope kann als Simulator und als Debugger arbeiten (in diesem Fall bezeichnet
KEIL das Programm auch als tSCOPE). Durch die Wahl der entsprechenden DLL
wird der entsprechende Arbeitsmodus eingestellt. Wir beschränken uns hier
auf die Verwendung als Debugger (tSCOPE).







|
http://�www�.�htblmo-klu�.�ac�.at/lernen/ �walter�.�waldner�@�telekabel�.at Walter �Waldner�
|
PCNEWS-61 Februar 1999
|
101
|
|
|
Mikroelektronik
|
Monitor für Mikrocontroller
|
|
|
Das kitCON-Board und der PC sind über das Starterkit-Kabel zu verbinden.
Achten Sie darauf, dass nur für Variante 1 der Bootstrap-Modus gewählt
sein muss (kitCON167-1997: den roten Jumper JP2 1+2 schließen, kitCON167-1998:
Schalter 1 auf SW3 schließen). Für alle anderen Varianten muss der Jumper
bzw. Schalter geöffnet sein. Der geschlossene Jumper bzw. Schalter aktiviert
nach dem Drücken der RESET-Taste die C167-interne Bootstrap-Sequenz. Der
MONITOR muss nur in Variante 1 mit dem Bootstrap-Mechanismus in das RAM
geladen werden.
Wählen Sie nun im Auswahlfenster links oben die MON166.DLL aus. Durch die
Auswahl der DLL
 MON166.DLL setzen Sie dScope in den Debug-Modus (die DLL
80167.DLL würde den Hardware-Simulator-Modus einstellen). Lassen Sie sich
von der Bezeichnung MON166.DLL nicht verwirren. Die spezifische Auswahl
des C167-Controllers für den Debugger erfolgt weiter unten.
MON166.DLL setzen Sie dScope in den Debug-Modus (die DLL
80167.DLL würde den Hardware-Simulator-Modus einstellen). Lassen Sie sich
von der Bezeichnung MON166.DLL nicht verwirren. Die spezifische Auswahl
des C167-Controllers für den Debugger erfolgt weiter unten.
Arbeiten Sie mit Variante 1, so sollte jetzt ein Fenster erscheinen, das
das Laden des MONITOR-Programms in das SRAM des kitCON-Boards anzeigt.
Die Varianten 2 und 3 erfordern kein Laden des Monitors, da er sich ja
bereits im Flash-Memory befindet.
Sollten Sie die Meldung
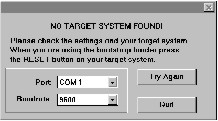
erhalten, kommuniziert der Monitor nicht mit dem dSCOPE-Programm. Überprüfen
Sie, ob das Kabel an der eingestellten PC-Schnittstelle angeschlossen ist
und ob die in INSTPHY7.A66 gewählte Baudrate mit der in dScope einzustellenden
Geschwindigkeit übereinstimmt.
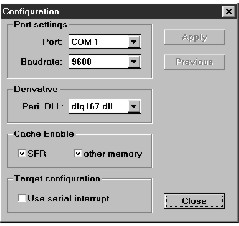
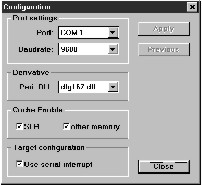
Die entsprechende Dialogbox erhalten Sie unter “Peripherals - Conf.” im
dScope-Hauptmenü. Für die Varianten 1 und 2 kann “Use serial interrupt”
aktiviert sein, für Variante 3 muss diese Option deaktiviert sein. Stellen
Sie außerdem in jedem Fall unter “Derivative - Peri. DLL” die Option dlg167.dll
ein, damit im Debug-Modus die Komponenten des C167-Microcontrollers korrekt
angezeigt werden. Diese sind geringfügig anders als beim C166 (dlg166.dll).
Noch eine Bemerkung zur Option “Use serial interrupt”: Wenn Sie für die
Varianten 1 und 2 diese Option aktivieren, kann das Anwenderprogramm durch
ESC (Command-Fenster) oder STOP (Debug-Fenster) angehalten werden. In diesem
Fall kann das Anwenderprogramm jedoch die ASC0-Schnittstelle des C167 nicht
für Text-Ein- und Ausgabe verwenden (z.B. printf, scanf). Einige Demoprogramme
(im Verzeichnis C:\C166EVAL\
EXAMPLES) verwenden diese C-Ein-/Ausgabe-Befehle.
Nun kann das Anwenderprogramm geladen werden. Klicken Sie dazu auf das
Symbol links von der Auswahlliste, in der Sie MON166.DLL gewählt haben.
Alternativ kann das Anwenderprogramm über “File - Load Object File” geladen
werden. Anschließend sollten Sie zumindest das Debug-Fenster öffnen. Über
das Debug-Fenster kann das Programm gestartet werden (Menüpunkt “Go”) oder
im Einzelschritt-Verfahren (Menüpunkte “Step Into”, “Step Over”) abgearbeitet
werden. Alternativ können Sie das Command-Fenster öffnen und dort den Befehl
g,main eingeben. Laufende Programme können im Debug-Fenster über “Stop”
(oder alternativ dazu im Command-Fenster durch Drücken der ESC-Taste) angehalten
werden. Außerdem können Breakpoints gesetzt werden. Nach jeder Unterbrechung
des Anwenderprogramms bzw. Ausführung eines Befehls im Single-Step-Modus
erfolgt ein Rücksprung in den Monitor. Der Monitor liest die aktuellen
Werte von internen Registern des C167 aus und überträgt diese an die dScope-Oberfläche,
wo sie dargestellt werden. Welche Register , Speicherbereiche, Variablen
usw. angezeigt werden sollen, können Sie unter dem Menüpunkt “Peripherials”
einstellen.
6. Insider-Informationen
Adressbereiche und Speicherbelegungen der Monitor-Programme
Zum Verständnis der nachfolgenden Informationen sollten Sie unbedingt vorher
das Kapitel 8 des C167-User-Manuals (External Bus Controller) studieren.
Das kitCON-C167-Board des Starterkits enthält 256 KB Flash-Memory und 64
KB SRAM. Das Flash-Memory wird über CS0 (chip select 0), das SRAM über
CS1 (chip select 1) aktiviert. Durch Konfiguration von ADDRSEL1 kann festgelegt
werden, für welchen Adressbereich der C167-Controller das CS1-Signal auf
LOW (aktiv) setzt und damit das SRAM anspricht. Ein Blick in CONFPHY7.INC
zeigt, dass ADDRSEL1 mit der Hex-Konstanten 0008 geladen wird. Dadurch
wird festgelegt, dass das erste Megabyte (000000 bis 0FFFFF) des Adressraums
dem SRAM zugeordnet wird. Wird also eine Adresse im Bereich 000000 bis
0FFFFF generiert, so ist damit stets eine Speicherzelle im RAM gemeint.
Nun ist aber das SRAM physikalisch nur 64 KB groß. Das bedeutet, dass durch
diese ADDRSEL1-Konfiguration das SRAM 16fach gespiegelt in das erste Megabyte
eingeblendet wird, da das SRAM nur die untersten 16 Bit der Adresse interpretiert.
Die Adressen FEAC5, EEAC5, DEAC5, ..., 0EAC5 adressieren also alle dieselbe
physikalische Speicherzelle.
Die Zuordnung von 1MB Adressraum für das SRAM wird vom Monitor deshalb
gemacht, weil es das kitCON-167-Board von Phytec auch mit 1 MB SRAM gibt.
Außerdem kann so der Adressbereich F000 bis FFFF (Systembereich) auch für
das SRAM genutzt werden (0F000 ... adressiert das interne RAM bzw. die
SFRs, xF000 ... [x>>0] adressiert das SRAM).
Das Flash-Memory wird über CS0 aktiviert. CS0 wird immer dann LOW (aktiv)
gesetzt, wenn eine Adresse nicht in einem Adressraum liegt, der durch ADDRSEL1
bis ADDRSEL4 festgelegt ist.
6.1.Memory-Mapping für die beschriebenen Variante 1:
Für die Variante 1 wurde durch den Befehl
INSTALL PHY7 0 FEA FEC BOOTSTRAP
der Monitor so generiert, dass er für Daten den Adressbereich FEA00 bis
FEBFF verwendet. Der Code selbst wird in den Adressbereich ab FEC00 abgelegt
und ist ca. 5 KB groß. Auf Grund der vorherigen Ausführungen beginnt der
Code des Monitors am Starterkit-Board somit auf der physikalischen SRAM-Adresse
EC00 und der Datenbereich bei EA00. Ihr Anwenderprogramm darf somit in
den SRAM-Bereich ab EA00 weder Daten noch Code ablegen, da ansonsten Programmteile
bzw. Daten des Monitor-Programms überschrieben werden.







|
102
|
PCNEWS-61 Februar 1999
|
Walter �Waldner� �walter�.�waldner�@�telekabel�.at http://�www�.�htblmo-klu�.�ac�.at/lernen/
|
|
|
|
Monitor für Mikrocontroller
|
Mikroelektronik
|
|
Hier das vollständige Address-Mapping für die hier beschriebene Variante
1 (Monitor im SRAM):
|
000000H-00EFFFH
|
freies SRAM
|
|
00F000H-00FFFFH
|
internes RAM und SFR’s
|
|
010000H-0FE9FFH
|
freies SRAM (Notiz 1)
|
|
0FEA00H-0FFFFFH
|
RAM für MONITOR
|
|
100000H-1FFFFFH
|
freies SRAM (Notiz 2)
|
|
200000H-23FFFFH
|
Flash Memory (Notiz 3)
|
|
240000H-....
|
Flash ROM (optional)
|
Notizen
1. Dieser Adressbereich entspricht nur dann physikalischem SRAM-Speicher,
wenn das kitCON-Board mit 1 MB SRAM ausgestattet ist (siehe Handbuch).
Beim Starterkit-Board werden diese Adressen auf die physikalischen Adressen
0000 bis E9FF des 64-KB-SRAMs gemappt (ADDRSEL1 = 0008), da vom 64 KB-SRAM
nur die unteren 16 bit des Adressbusses ausgewertet werden.
2. In der Originaldatei CONFPHY7.INC wird ADDRSEL2 mit der Hexkonstanten
1008 geladen. Damit wird CS2 (chip select 2) aktiviert, wenn eine Adresse
im Bereich des zweiten Megabytes liegt (100000 bis 1FFFFF). CS2 wird vom
Starterkit-Board nicht weiter verwendet.
3. Das Flash-Memory wird durch CS0 aktiviert. CS0 wird generiert, wenn eine
Adresse außerhalb der konfigurierten ADDRSEL-Bereiche angesprochen wird.
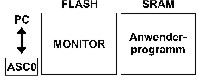
6.2. Memory-Mapping für die beschriebenen
Varianten 2 und 3:
Für die Varianten 2 und 3 wurde der Monitor durch
INSTALL PHY7 0 FFE 2000 bzw.
INSTALL PHY7 2 FFE 2000
generiert. Der Monitor belegt für Daten den Adressbereich FFE00 bis FFFFF
(das oberste Ende des (gespiegelten) SRAM-Bereichs). Der Code beginnt an
der Adresse 200000 (FLASH-Adreßbereich) und ist etwas mehr als 5 KB groß.
Das vollständige Adress-Mapping für die Varianten 2 und 3 (Monitor im FLASH-EEPROM):
|
000000H-00BFFFH
|
freies SRAM
|
|
00C000H-00EFFFH
|
SRAM,XRAM,CAN
|
|
00F000H-00FFFFH
|
internes RAM, SFR
|
|
010000H-0FFDFFH
|
freies SRAM (Notiz 1)
|
|
0FFE00H-0FFFFFH
|
Daten für Monitor
|
|
100000H-1FFFFFH
|
freies SRAM (Notiz 2)
|
|
200000H-23FFFFH
|
Flash Memory (Notiz 3)
|
|
240000H-....
|
Flash ROM (optional)
|
Notizen
1. wie vorhin (Variante 1)
2. wie vorhin (Variante 1)
3. Für die Varianten 2 und 3 liegt der Code des Monitor-Programms im Speicherbereich
ab 200000. Auch dieser Speicherbereich ist nicht wirklich (physikalisch)
mit Flash-Memory hinterlegt. Wie bereits beim SRAM beschrieben, erscheint
auch das Flash-Memory im 16-MB-Adressraum des C167 mehrfach gespiegelt.
Die Adresse 200000 ist physikalisch die Speicherzelle 0 im 256-KB-Flash-Modul
des Starterkit-Boards. Da der Flash-Programmer FLASHT.EXE physikalische
Adressen ab Adresse 0 erfordert, war im Aufruf
..\BIN\OH166 MONITOR H167 OFFSET (-0x200000)
die Offset-Angabe erforderlich.
7. Schlussbemerkungen
Herrn Ing. Wilhelm Brezovits, Siemens Wien und Herrn Dipl.-Ing. Hans Schneebauer,
Keil München danke ich für die Unterstützung und die Informationen, ohne
die dieser Artikel nicht zustande gekommen wäre.
Der Artikel darf in unveränderter Form ohne Einschränkungen weitergegeben
werden. Bemerkungen, Anregungen, Fehlermeldungen bitte ich per E-Mail an
mich zu richten.
Ergänzende und weiterführende Literatur und Web-Sites zum Thema des Artikels
[1] Erfolgreich Starten mit dem Siemens C167CR-Starterkit und dem Software-Entwicklungssystem
von KEIL, Walter Waldner 1998. Verfügbar auf: http://www.htblmo-klu.ac.at/lernen/
[2] Umfassende Informationen über die Siemens-Microcontroller finden Sie
auf der Web-Seite http://www.smi.siemens.com/
embedded/
[3] Das Internet-Angebot der Firma KEIL finden Sie unter den Adressen http://www.keil.com/~market/
|
J
|
Dr. Walter Waldner
|
|
*
|
HTBL Klagenfurt
Mössingerstraße 25
|
|
E*
|
walter.waldner@telekabel.at
|
|
c
|
http://www.htblmo-klu.ac.at/lernen/
|
© 1998 by Walter Waldner
Version 1.2 / Letzte Änderung: 28DEZ98
Rahmen9







|
http://�www�.�htblmo-klu�.�ac�.at/lernen/ �walter�.�waldner�@�telekabel�.at Walter �Waldner�
|
PCNEWS-61 Februar 1999
|
103
|
|