Autonomes Segelboot zur Gewitterwarnung
Die Idee zu dieser Diplomarbeit an der HTL Hollabrunn entstand durch die jährliche World Robotic Sailing Championship, die im Jahre 2008 am Neusiedlersee stattfand. Bei diesem Wettbewerb fahren Autonome Segelboote eine Regatta, bei der sie die komplexen Abläufe des Segelns voll autonom und ohne menschliches Zutun durchführen müssen. Angefangen von der Berechnung der optimalen Route anhand von Wetterdaten bis hin zur selbstständigen Durchführung von Wende und Halse sind Autonome Segelboote durch die Analyse von Sensordaten mittels künstlicher Intelligenz fähig, jedes beliebige Ziel anzusegeln. Lediglich die Eingabe der Zielkoordinaten erfolgt durch den Menschen.
An der Elektronik- Abteilung der HTL Hollabrunn wurde im Rahmen von Diplomarbeiten ein Autonomes Segelboot konstruiert, welches als mobile Messstation genutzt werden kann. Dazu können die erforderlichen Messgeräte einfach angeschlossen bzw. ausgetauscht werden. Neben dem GPS- Empfänger, einem Magnetfeldsensor als Kompass werden mikrocontrollergesteuerte Messgeräte für Wind, stationäres elektrisches Feld (Feldmühle) und Spherics (impulshaftes Auftreten von elektromagnetischen Feldern) mitgeführt. Für die Steuerung des Segelvorganges sind Servoantriebe für das Ruder und die Segelwinde vorgesehen. Ein ARM Mikrocontroller steuert das Boot, liest die Sensoren aus und schreibt sie in die Datenbank. Die Messdaten werden an vorgegebenen GPS- Rasterpunkten erfasst und in einer Datenbank abgespeichert. Durch die Ausrüstung des Segelbootes mit einer ISM Funkverbindung können die Daten der mitgeführten Messgeräte an die Umweltdatenbank der Elektronik- Abteilung der HTL Hollabrunn geschickt werden. Alle erfassten, in der Datenbank gespeicherten Daten sowie der tatsächliche Kurs des Segelbootes können graphisch und numerisch in Real Time mittels Web- Browser weltweit jederzeit online abgerufen werden.
Das ganze Projekt wurde von zwei Gruppen realisiert. Die Projektgruppe „Autonomes Segelboot“ war für den Aufbau und die Implementierung der Antriebssteuerung zuständig. Die Funkübertragung der gemessenen Daten und die Herstellung der Messgeräte für elektrisches Feld und Spherics wurde von der Projektgruppe Funksensornetzwerk realisiert. Dieses autonome Segelboot soll den Neusiedlersee befahren.

Das
Projektteam von links nach rechts:
Markus Poisinger, Andreas Kirbes, Bernhard Schwanzer, Thomas Lurf.
Am 17. 05. 2010 fand in den Räumlichkeiten der Akademie der Wissenschaften in Wien die österreichweite Endausscheidung des Cyberschool- Wettbewerbes der Economy Austria statt. Dabei konnten die Projektanten ihr Projekt beim größten, österreichweiten SchülerInnen- Wettbewerb im Bereich Internet, Mobile und Multimedia überzeugend präsentieren. Sie erreichten damit den 2. Platz und konnten 200,- Euro Preisgeld in Empfang nehmen.
Technische Detailbeschreibung
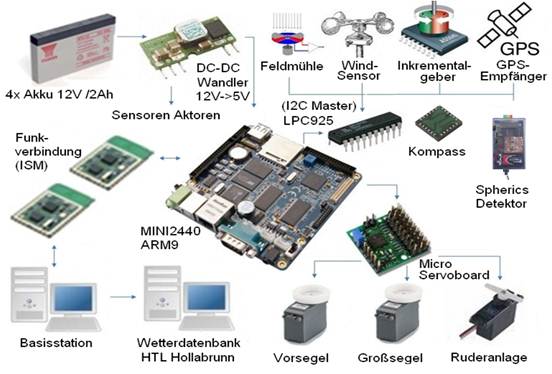
In den folgenden zwei Bildern sind die Hauptkomponenten des Segelbootes dargestellt.
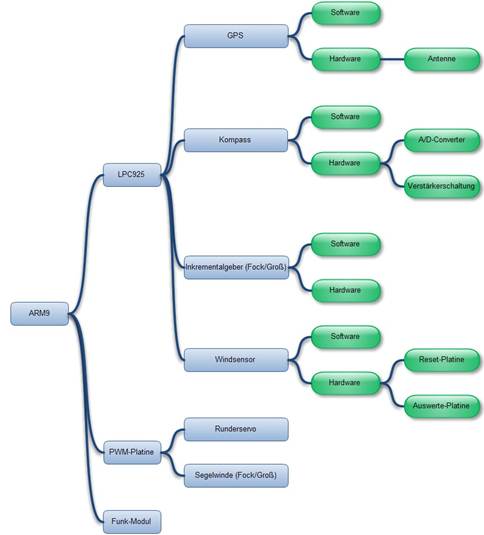
Ein ARM9 steuert das Funkmodul, die PWM- Platine für die Servoantriebe und einen LPC925- Controller, der die Kommunikation mit den Messgeräten und Sensoren übernimmt.
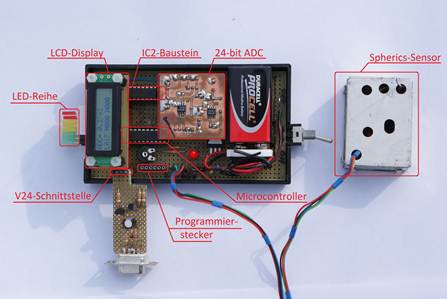
Der Spherics- Detektor misst die luftelektrische Aktivität der Gewitterblitze, um ein herankommendes Gewitter zu erkennen. Die selbst gebaute Empfangseinrichtung besteht aus einer einfachen Drahtantenne mit einem Nachverstärker und Impulsformer. Das Gerät kann auch im Stand-Alone- Betrieb als Indikator für herannahende Gewitter verwendet werden. Die Gewitteraktivität wird zusätzlich mit einer LED- Reihe angezeigt. Über eine V24 ist der Detektor mit dem LPC verbunden.
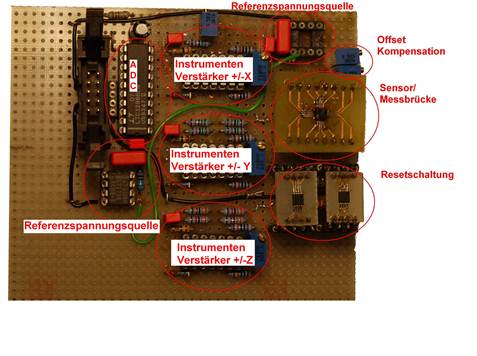
Die Realisierung des Kompasses erfolgte mit dem Sensor HMC1043 von Honeywell. Dabei handelt es sich um einen preiswerten 3- Achsenkompass, der neben der Himmelsrichtung auch noch die Neigung des Bootes messen kann.
|
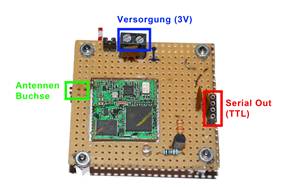
Der GPS- Empfänger meldet die Positionsdaten an das System. Es wird das Modul GPS-310FS der Firma RF Solutions Ltd. eingesetzt. Die handelsübliche Antenne wird über ein HF- Kabel an die Antennenbuchse angesteckt.
|
|
|
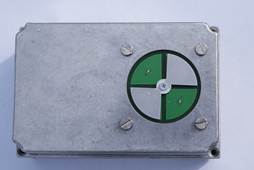
Zur Messung des elektrostatischen Feldes der Luft wurde eine Feldmühle (Rotationsvoltmeter) eingesetzt. Diese Feldmühle wurde als Bausatz bei Philipp Keller, Oberhusestraße 10, CH-8460 Marthalen beschafft (Internet http://www.marthalenwetter.ch/ ). Die Feldstärkemessung ist als Ergänzung zur Spherics- Detektion und zu den Wetterdaten zu sehen. |
|
ARM9 Linux- Steuerrechner


Ein ARM9 mit Linux Betriebssystem kommuniziert über mehrere RS232 Schnittstellen mit den Sensoren, den Aktoren und mit der Basisstation. Mehrere 8051 Slaves (LPC925) sind über I2C-Bus vernetzt und setzen die UART Signale vom Wind, Kompass, GPS, Spherics Messgerät und der Feldmühle auf I2C-Bus um. Des weiteren verfügt der ARM9 noch über einen SD- Cardreader und eine USB- Schnittstelle. Auf diesen Massenspeichern können die notwendigen Karten für die Navigation gespeichert werden. Sollte keine Verbindung zur Basisstation bestehen, können die gemessenen Werte auch auf diesen Medien gespeichert werden.